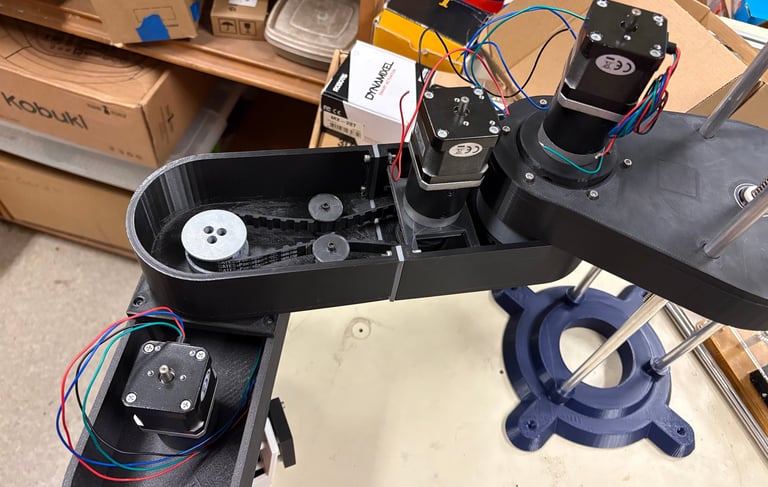
SCARA Robot Arm
As the mechanical and electrical robot arm team lead at my design team UBC Open Robotics, I had the opportunity to lead a team of 7 engineering students through a project lifecycle from concept to 3D printed prototype. This involved setting timelines and leading design reviews for both mechanical structural design and electrical circuit design.
What did I do?
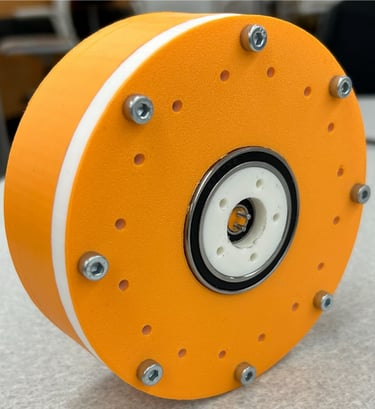
Designed, 3D printed and assembled motor frames, custom pulleys, 3 encoder mounts, bearing and fastener countersinks in Onshape.
Conducted mechanical design reviews of peers’ CAD models of a planetary gearbox, gripper, and linear actuator structure, reducing the part count by 4, minimized stress concentrations, and improved manufacturability and assembly by applying DFM and DFA.
Led a 5-student team through a complete project lifecycle, setting timelines, leading design reviews and purchases.
Skills:
DFM/DFA
CAD (Onshape)
FDM 3D Printers (Bambu Lab P2S)
Hand Tools (screwdriver, sanding sticks)
Part Selection (Motors, Bearings, Pulleys)
Project Management